I am an Assistant Professor in AI at Imperial College London in the Department of Earth Science and Engineering and lead the Scalable Scientific Machine Learning Lab. I also hold a Schmidt AI in Science Fellowship at I-X.
Previously, I was a Postdoctoral Fellow and Lecturer at the ETH Zürich AI Center and member of the ETH Zürich Computational and Applied Mathematics Lab. I completed my PhD on physics-informed machine learning at the University of Oxford’s Center for Autonomous Intelligent Machines and Systems. Alongside my PhD I was a Scientific Machine Learning Intern at NVIDIA, and a Machine Learning Team Lead for NASA’s Frontier Development Lab. Before this I was a Geophysicist at BP, and studied physics (Master’s degree) at Durham University, UK.

Research focus
- I lead the Scalable Scientific Machine Learning Lab at Imperial. Check out our website to learn more!
The goal of my research is to accelerate scientific discovery by developing scientific machine learning (SciML) algorithms. SciML methods tightly integrate scientific understanding with ML. I focus on designing methods that can scale to solve complex, real-world problems. I have developed new methods for carrying out multi-scale simulation using physics-informed neural networks, designed a low-light satellite image denoising algorithm which allowed the lunar community to see into permanently shadowed regions on the Moon for the first time, used ML to track elephants in Kenya and investigated the limitations of physics-informed machine learning for accelerating seismic simulation.
I want to inform the world about AI and its impact on science. I do this by writing AI blogs, teaching, releasing open-source code and publishing research at the intersection of ML and the sciences.
Teaching
I am a lecturer for the Deep Learning module taught as part of the Master’s programmes in Imperial College London’s Department of Earth Science and Engineering.
Previously, I was a lecturer for ETH Zürich’s 2024 AI in the Sciences and Engineering Master’s course and ETH Zürich’s 2023 Deep Learning in Scientific Computing Master’s course.
Watch more of my lectures at ETH Zürich here!
Recent publications
Key: plain language summary

A differentiable hybrid modeling approach for learning soil water retention mechanisms from partial knowledge and data.
Reframed how soil water retention is modelled by augmenting traditional modelling with machine learning components that learnt previously uncertain physics directly from data. Using this method, we accurately reproduced soil water retention behaviour and uncovered new pore-scale insights.
Norouzi, S., Moldrup, P., Moseley, B. et al (2026).
Journal of Hydrology.
Paper
Local Feature Filtering for Scalable and Well-Conditioned Domain-Decomposed Random Feature Methods.
Significantly accelerated the training of physics-informed neural networks by using random features and domain decomposition to turn their optimisation problem into a structured least squares problem and proposing a novel preconditioner to accelerate convergence.
Willem van Beek, J., Dolean, V., Moseley, B. (2025).
Computer Methods in Applied Mechanics and Engineering.
Paper Code Workshop
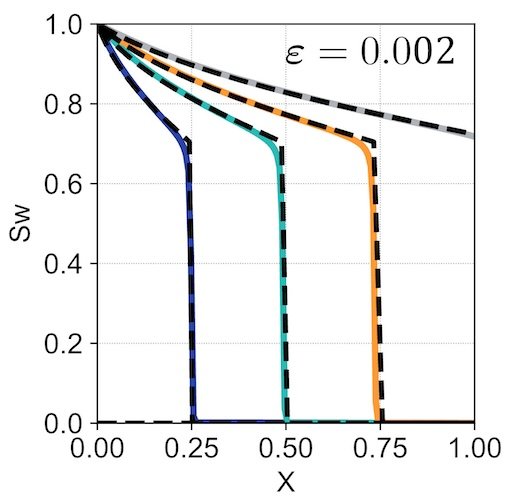
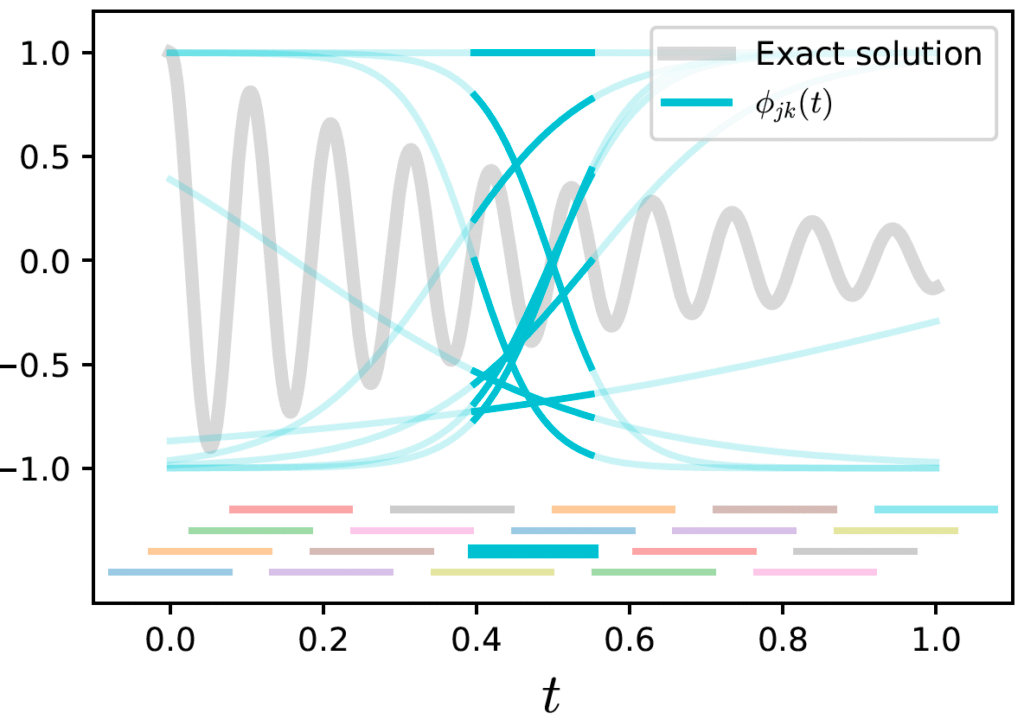
Challenges and advancements in modeling shock fronts with physics-informed neural networks: A review and benchmarking study.
Explores how to improve physics-informed neural networks for solving equations that involve sudden physical changes – like shock waves – highlighting their current limitations and the need for better techniques to handle complex problems accurately.
Abbasi, J., Jagtap, A., Moseley, B., Hiorth, A., Andersen, P. (2025).
Neurocomputing.
Paper Preprint
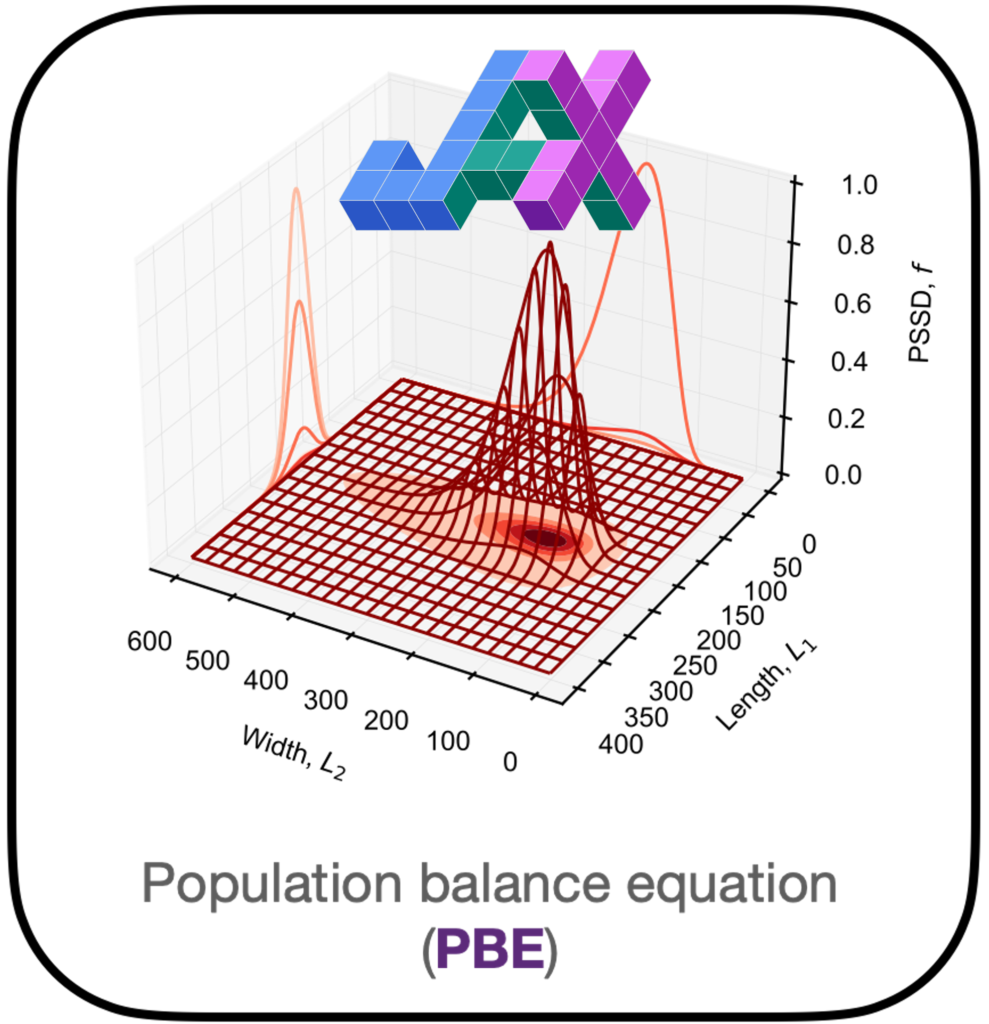
Modern, Efficient, and Differentiable Transport Equation Models Using JAX: Applications to Population Balance Equations.
Alsubeihi, M., Jessop, A., Moseley, B., Fonte, C.P., Rajagopalan, A.K. (2025).
Industrial & Engineering Chemistry Research.
Paper
News
- [Jul 2026] Our latest research on discovering soil physics processes was featured by Imperial News.
- [Apr 2026] I will be teaching a new 3-week Scientific Machine Learning module for the Imperial Applied Computational Science and Engineering, and Environmental Data Science and Machine Learning 2026/27 Master’s programmes! More to come soon.
- [Feb 2026] Our AI for science research was covered by the Imperial Magazine!
- [Nov 2025] I gave a workshop on scalable physics-informed neural networks at CWI Amsterdam.
- [Jun 2025] Very excited to announce the launch of our new lab website!
- [May 2025] I’m joining the editorial board of the new ACM Transactions on AI for Science journal as an Associate Editor.
- [Nov 2024] I’m joining Imperial College London as a Lecturer in AI at the Department of Earth Science and Engineering and leading the Scalable Scientific Machine Learning Lab.
- [Oct 2024] We hit 100,000 views of our ETH Zürich Deep Learning in Scientific Computing course on YouTube!
- [Jan 2024] I will be a lecturer for ETH Zürich’s AI in the Sciences and Engineering Master’s course (150+ students).
- [Jun 2023] Our latest ArXiv paper is out, which improves physics-informed neural networks by combining them with multiple levels of domain decompositions.
- [Jan 2023] I will be a lecturer for ETH Zürich’s Deep Learning in Scientific Computing Master’s course (150+ students).
- [Sept 2022] I have joined ETH Zürich AI Center as a postdoctoral fellow.
- [Aug 2022] Our Geophysical Research Letters paper which characterises permanently shadowed landing sites on the Moon for NASA’s Artemis mission has been published.
- [Jul 2022] I successfully defended my PhD thesis, Physics-informed machine learning: from concepts to real-world applications.
- [Feb 2022] I was a course tutor and lead teaching assistant for the University of Oxford Department of Computer Science courses in Artificial Intelligence and Advanced Topics in Machine Learning.
- [Dec 2021] I will be interning within NVIDIA’s Modulus team, contributing to their state-of-the-art Modulus scientific machine learning framework.
- [Nov 21] Two NeurIPS workshop papers (here and here) accepted at The Symbiosis of Deep Learning and Differential Equations and Machine Learning and the Physical Sciences.
- [Oct 2021] My blog post on physics-informed neural networks hit 1M+ views! Thank you for all of the great conversation on this post!
- [Sep 2021] Our Nature Communications paper on peering into permanently shadowed regions on the Moon’s surface with machine learning is out. Read the press coverage from NASA, the Max Planck Institute and the University of Oxford here, here and here.
- [Jul 2021] Our latest ArXiv paper (and code) is out, which proposes FBPINNs: a scalable method for solving differential equations using physics-informed neural networks.
- [Jul 2021] Our Journal of The Royal Society Interface paper which localises elephants using their ground vibrations is out. Read the press coverage from the University of Oxford here.
- [Jun 2021] I will be returning to NASA’s Frontier Development Lab this year as a faculty member, helping to super-resolve images of the lunar surface.
- [Mar 2021] Our paper on denoising extremely low-light images of the lunar surface has been accepted at CVPR. Read my blog post here.
- [Feb 2021] I was a teaching assistant for the University of Oxford Department of Computer Science course in Advanced Topics in Machine Learning.
- [Nov 2020] I was a teaching assistant for the University of Oxford Centre for Autonomous Intelligent Machines and Systems course on Machine Learning.
- [Sep 2020] I helped to accelerate wind energy production in the UK by leading a team of 8 ML researchers at the UK Alan Turing Institute 2020 September Data Study Group.
- [Aug 2020] Our Solid Earth manifesto paper on using deep learning to accelerate seismic simulation has been published.
- [Jul 2020] Our Planetary Science Journal paper on using unsupervised machine learning to discover thermal anomalies on the Moon has been published.
- [Jun 2020] Our latest ArXiv paper is out, on using physics-informed neural networks to solve the wave equation.
- [Feb 2020] Our team won best technical solution at the Oxford Foundry AI & Climate Change Hackathon.
- [Jan 2020] I was invited to be a Series Editor for Elsevier’s 2020 Advances in Geophysics special issue on Machine Learning in the Geosciences.
- [Jun 2019] I will be joining NASA’s Frontier Development lab this summer as a AI researcher, working in their Moon For Good team.
Invited talks
- [2026] Local random feature filtering for scalable and well-conditioned physics-informed neural networks.
Mini-symposium on Scalable Neural and Hybrid Methods for Solving Complex PDEs, SIAM Conference on Parallel Processing for Scientific Computing. - [2026] Bridging the gap between AI and classical methods for physical modelling.
Royal Holloway, AI for Science Seminar (panelist) / PhysicsX / Pasteur Labs. - [2025] Poster presentation x3.
Workshop on Differentiable Systems and Scientific Machine Learning, EurIPS. - [2025] Efficient finite-basis physics-informed neural networks [Slides].
European Mathematical Society Meeting on Scientific Machine Learning / Imperial College London / University of Oxford. - [2025] Accelerating science with scientific machine learning: from the Earth to the Moon.
University of Bern. - [2024] Poster presentation.
AI for Science Summit, University of Cambridge. - [2023] Scaling physics-informed neural networks to high frequency and multiscale problems using domain decomposition [Slides].
Conference on Deep Learning for Computational Physics, M4DL / ICIAM 2023. - [2023] Overview of Deep Learning in Scientific Computing.
NASA Frontier Development Lab. - [2022] Finite basis physics-informed neural networks (FBPINNs): a scalable domain decomposition approach for solving differential equations [Recording].
CRUNCH group, Brown University. - [2022] Peering into permanently shadowed regions on the Moon using machine learning.
Session on Machine Learning and Data Science in Planetary Science, American Geophysical Union / NASA/VIPER. - [2021] Poster presentation.
Workshop on Deep Learning for Differential Equations, NeurIPS. - [2021] Scalable physics-informed deep learning for solving differential equations.
NVIDIA Research / UK Science and Technology Facilities Council / University of Oxford. - [2021] Poster presentation.
CVPR main conference. - [2021] Machine learning for lunar exploration.
UKRI Joint CDT Conference in Robotics and AI. - [2020] Poster presentation.
Workshop on Machine Learning and the Physical Sciences, NeurIPS. - [2020] Solving the wave equation with physics-informed machine learning.
Stanford Earth. - [2020] Anomaly detection on the lunar surface with variational autoencoders.
Machine Learning and Astrophysics workshop, ETH Zürich / UCLA Diviner seminar. - [2019] Poster presentation.
Workshop on Machine Learning for Geophysical Signals, NeurIPS.
Invited lectures / workshops
- [2026] Symbolic regression with deep neural networks [Code].
African Institute for Mathematical Sciences, Cape Town. - [2025] Improving the efficiency of physics-informed neural networks with domain decomposition, linear algebra, and JAX [YouTube] [Slides and code] [Website].
Autumn School on Scientific Machine Learning and Numerical Methods, Netherlands Center for Science & Informatics. - [2025] Symbolic regression with deep neural networks [Code].
African Institute for Mathematical Sciences, Cape Town. - [2024] Introduction to physics-informed neural networks (mini-lecture) [Slides] [Code].
Imperial College London. - [2024] Introduction to JAX workshop [Slides, recording and code].
ETH Zürich AI Center. - [2024] Scientific machine learning and physics-informed neural networks.
Department of Engineering and Management Doctoral School Seminar Series, University of Padova / Lucerne University. - [2023] Guest lecturer.
GAMM Juniors Summer School on Scientific Machine Learning. - [2023] How to incorporate physical understanding into machine learning [Lecture recording].
Physical Society of Zurich. - [2022] Scientific machine learning: ways to incorporate scientific principles into machine learning [Slides].
University of Oxford / University of Wyoming / Lucerne University / Roche.
Latest blog posts
- So, what is a physics-informed neural network?
 Machine learning has become increasingly popular across science, but do these algorithms actually “understand” the scientific problems they are trying to solve? In this article we explain physics-informed neural networks, …
Machine learning has become increasingly popular across science, but do these algorithms actually “understand” the scientific problems they are trying to solve? In this article we explain physics-informed neural networks, …Continue reading “So, what is a physics-informed neural network?”
- Seeing into permanently shadowed regions on the Moon for the first time using machine learning
 As part of NASA’s Frontier Development Lab, we developed an AI algorithm which enhanced images of permanently shadowed regions on the Moon, allowing us to see into these extremely dark …
As part of NASA’s Frontier Development Lab, we developed an AI algorithm which enhanced images of permanently shadowed regions on the Moon, allowing us to see into these extremely dark … - We used AI to search for resources on the Moon
 As part of NASA’s 2019 Frontier Development Lab, we used AI to search for resources on the surface of the Moon which could one day help humans settle there. The …
As part of NASA’s 2019 Frontier Development Lab, we used AI to search for resources on the surface of the Moon which could one day help humans settle there. The …Continue reading “We used AI to search for resources on the Moon”
- Bayesian positioning with pymc3
 Today we rely on GPS for almost everything, from driving our cars to auditing our financial transactions. However when tracking animals this system is invasive because it requires the use …
Today we rely on GPS for almost everything, from driving our cars to auditing our financial transactions. However when tracking animals this system is invasive because it requires the use … - Can we track elephants using the vibrations they make through the ground?
 In February this year I joined a research trip in Kenya and helped to investigate whether it is possible to track elephants using the vibrations they make through the ground. …
In February this year I joined a research trip in Kenya and helped to investigate whether it is possible to track elephants using the vibrations they make through the ground. …Continue reading “Can we track elephants using the vibrations they make through the ground?”
- Hello world!Brand new website launched! I am excited to launch the website (it’s my first forage into website development so bear with me..), watch out for posts on AI and machine …
Latest comments
Excellent explanation of physics-informed neural networks! The way you combined machine learning concepts with real-world physical constraints made the topic…
This post does a great job of explaining physics-informed neural networks (PINNs) in a clear and approachable way. I especially…
This is a fascinating overview of physics-informed neural networks! I loved how you explained their importance in bridging the gap…
This post provides an excellent overview of physics-informed neural networks! I especially appreciated how you explained their potential to bridge…
This post does an excellent job of explaining physics-informed neural networks in a clear and engaging way. I especially appreciated…